



Mikro Metal Redüktörlü Motorlar için Manyetik Encoder Takımı (Çift) - 12 CPR - 2.7-18V - HPCB Uyumlu - Pololu 3081
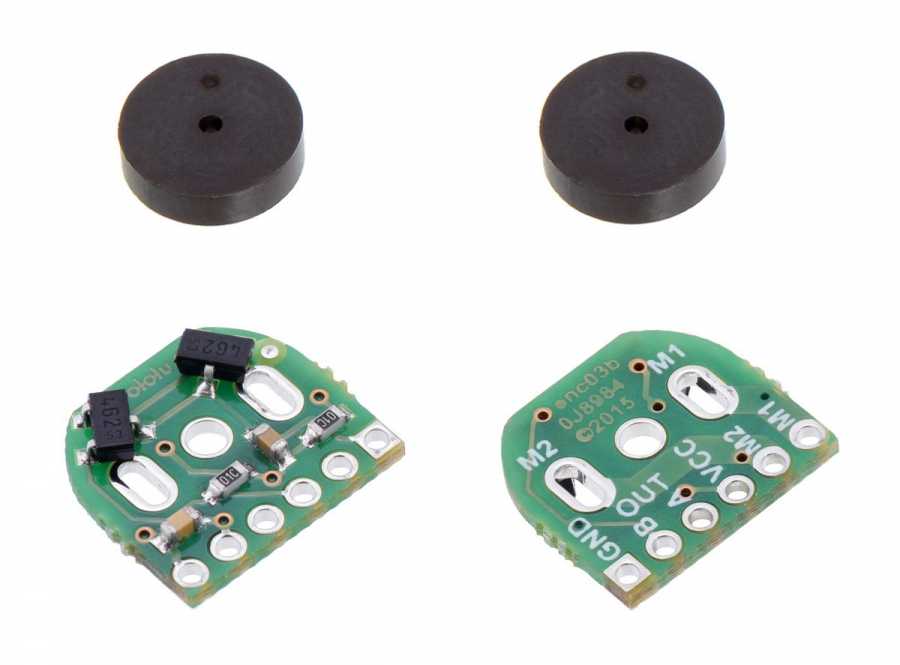
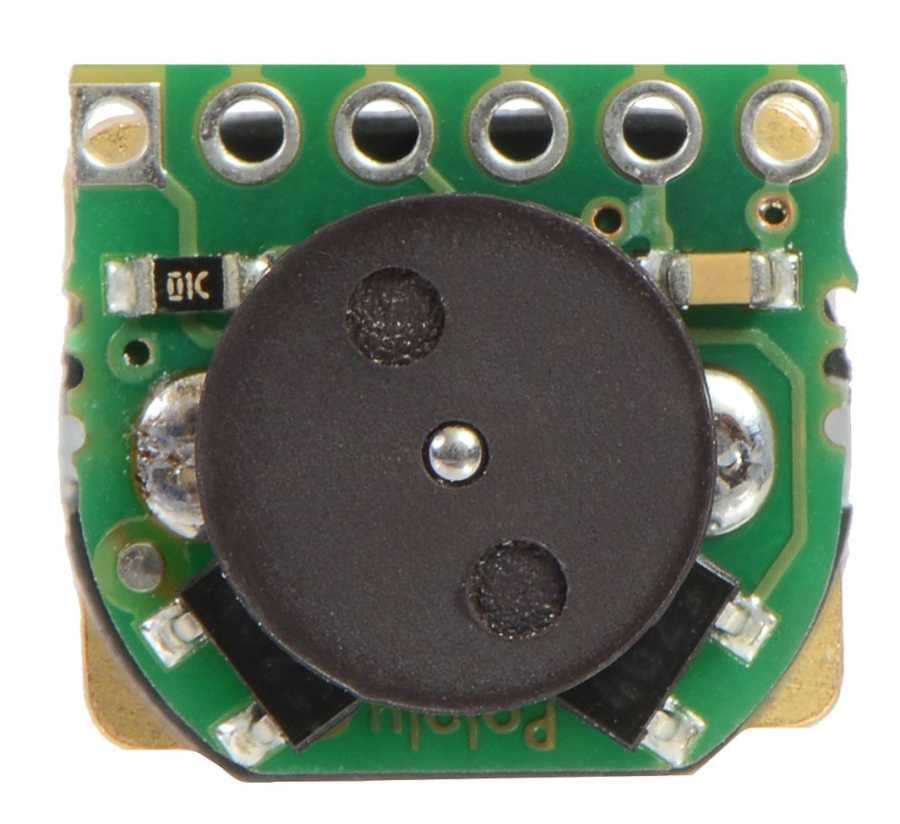
Motor milinin devrini başına 12 sayım sağlamak için bir manyetik disk ve hall effect sensörleri kullanan bu kit ile mikro metal redüktörlü motorlarınıza (genişletilmiş arka mil sürümü gereklidir) kareleme enkoderi ekleyin. Sensörler 2,7 V ila 18 V arasında çalışır ve doğrudan bir mikro denetleyici veya diğer dijital devrelere bağlanabilen dijital çıkışlar sağlar. Bu modül, HPCB sürümleri de dahil olmak üzere taşıdığımız çift saftalı mikro metal redüktörlü motorlarla uyumludur.
Manyetik Encoder Takımı Teknik Özellikleri
- Boyut: 10.6 mm x 11.6 mm1
- Ağırlık: 1.0 g2
- Minimum çalışma gerilimi: 2.7 V
- Maksimum çalışma gerilimi: 18 V
- İşaretleri belirleme
- PCB dev kodları: enc03b
- Diğer PCB işaretleri: 0J8984
Notlar
- Monte edilmiş kodlayıcı, plastik motor uç kapağının 5 mm uzağına kadar uzanacaktır (tamamen uzatılmış motor şaftının uzunluğu içine sığar).
- Tam set ağırlığı. Her bir enkoder tahtası ~ 0.2 g ağırlığındadır ve her mıknatıs diski ~ 0.3 g ağırlığındadır.
Dökümanlar
Faydalı Linkler
- 12V Redüktörlü Motor ürünlerimizi inceleyebilirsiniz.
" ["DOCUMENT_INFO"]=> string(0) "" ["WARRANTY_INFO"]=> string(0) "" ["DELIVERY_INFO"]=> string(0) "" ["WAREHOUSE"]=> string(16) "R11-014 - İthal" ["DELIVERY_DAY"]=> string(0) "" ["IS_VIDEO_ACTIVE"]=> string(1) "0" ["NOTES"]=> string(0) "" ["TAGS"]=> array(1) { [0]=> array(2) { ["URL"]=> string(18) "encoderli-dc-motor" ["TITLE"]=> string(18) "encoderli dc motor" } } ["IS_ORDER_NOTE_ACTIVE"]=> bool(false) ["IS_CASH_POINT_ACTIVE"]=> bool(false) ["RELATED_PRODUCTS_IDS1"]=> string(0) "" ["RELATED_PRODUCTS_IDS2"]=> string(0) "" ["RELATED_PRODUCTS_IDS3"]=> string(0) "" ["RELATED_PRODUCTS_IDS1_COUNT"]=> int(0) ["RELATED_PRODUCTS_IDS2_COUNT"]=> int(0) ["RELATED_PRODUCTS_IDS3_COUNT"]=> int(0) ["IS_POPUP_PHOTO_ACTIVE"]=> string(1) "1" ["MIN_ORDER_COUNT"]=> string(1) "1" ["DISPLAY_GAIN"]=> bool(false) }
Mikro Metal Redüktörlü Motorlar için Manyetik Encoder Takımı (Çift) - 12 CPR - 2.7-18V - HPCB Uyumlu
- Ürün Özellikleri
- Ödeme Seçenekleri
- Yorumlar (0)
- Resimler
-
Mikro Metal Redüktörlü Motorlar için Manyetik Encoder Takımı (Çift) - 12 CPR - 2.7-18V - HPCB Uyumlu - Pololu 3081
Motor milinin devrini başına 12 sayım sağlamak için bir manyetik disk ve hall effect sensörleri kullanan bu kit ile mikro metal redüktörlü motorlarınıza (genişletilmiş arka mil sürümü gereklidir) kareleme enkoderi ekleyin. Sensörler 2,7 V ila 18 V arasında çalışır ve doğrudan bir mikro denetleyici veya diğer dijital devrelere bağlanabilen dijital çıkışlar sağlar. Bu modül, HPCB sürümleri de dahil olmak üzere taşıdığımız çift saftalı mikro metal redüktörlü motorlarla uyumludur.
Manyetik Encoder Takımı Teknik Özellikleri
- Boyut: 10.6 mm x 11.6 mm1
- Ağırlık: 1.0 g2
- Minimum çalışma gerilimi: 2.7 V
- Maksimum çalışma gerilimi: 18 V
- İşaretleri belirleme
- PCB dev kodları: enc03b
- Diğer PCB işaretleri: 0J8984
Notlar
- Monte edilmiş kodlayıcı, plastik motor uç kapağının 5 mm uzağına kadar uzanacaktır (tamamen uzatılmış motor şaftının uzunluğu içine sığar).
- Tam set ağırlığı. Her bir enkoder tahtası ~ 0.2 g ağırlığındadır ve her mıknatıs diski ~ 0.3 g ağırlığındadır.
Dökümanlar
Faydalı Linkler
- 12V Redüktörlü Motor ürünlerimizi inceleyebilirsiniz.
Ürün Etiketleri
-
 42,38 TL + KDV
42,38 TL + KDV -
İNDİRİM
142,40 TL 79,51 TL + KDV
-
84,76 TL + KDV
-
84,76 TL + KDV
-
İNDİRİM
274,64 TL 119,01 TL + KDV
-
İNDİRİM
203,44 TL 130,54 TL + KDV
-
İNDİRİM
176,99 TL 98,82 TL + KDV
-
113,58 TL + KDV
-
491,64 TL + KDV
-
254,29 TL + KDV
-
254,29 TL + KDV
-
220,39 TL + KDV
-
194,96 TL + KDV
-
27,12 TL + KDV
-
167,83 TL + KDV
-
152,58 TL + KDV
-
İNDİRİM
162,75 TL 61,03 TL + KDV
-
YENİ Stokta Yok
22,04 TL + KDV
-
YENİ
84,76 TL + KDV
-
84,76 TL + KDV
-
İNDİRİMStokta Yok
101,72 TL 65,27 TL + KDV
-
YENİ Stokta Yok
74,59 TL + KDV
-
YENİ Stokta Yok
74,59 TL + KDV
-
YENİ Stokta Yok
74,59 TL + KDV
-
İNDİRİM
65,10 TL 49,91 TL + KDV
-
İNDİRİM
65,10 TL 41,77 TL + KDV
-
İNDİRİM
73,24 TL 46,99 TL + KDV
-
İNDİRİM
73,24 TL 46,99 TL + KDV
-
256,33 TL + KDV
-
YENİ
256,33 TL + KDV
-
37,30 TL + KDV
-
33,91 TL + KDV
-
428,91 TL + KDV
-
428,91 TL + KDV
-
428,91 TL + KDV
-
İNDİRİM
162,75 TL 67,81 TL + KDV
-
İNDİRİM
305,15 TL 183,09 TL + KDV
-
İNDİRİM
254,29 TL 105,96 TL + KDV